TUGAS 8
Aplikasi Pengontrol Kecepatan Motor Menggunakan
Sensor ultrasonik dan Optocoupler
1. Tujuan[kembali]
2. Alat dan Bahan[kembali]

4) Op-Amp 
5) Transistor ( 2N1711 ) 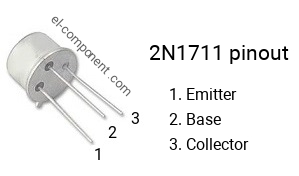
6) Motor DC

7) Led 
8) Baterai DC 
10) Voltmeter DC 

Sensor Ultrasonik
Non Inverting Amplifier





kurva sensor optocoupler hubungan kecepatan terhadap waktu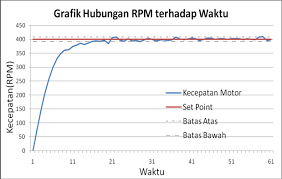
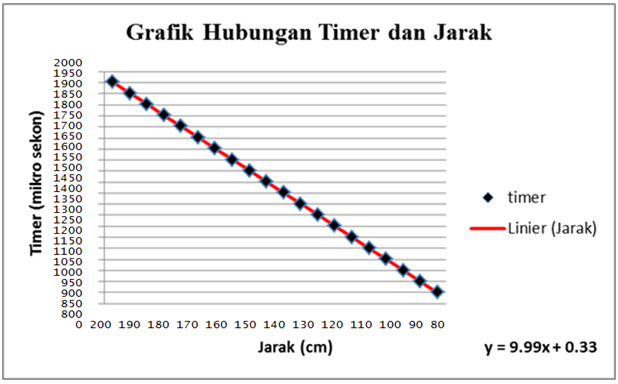
kurva sensor ultrasonic hubungan antara waktu dengan jarak :
Motor
Merupakan piranti elektronika yang mengubah energi listrik menjadi energi mekanik. pada motor DC terdapat 2 Input yang jika diberikan input yang berbeda maka motor akan berputar CCW atau CW tergantung pada inputan yang dimasukan dan jika diberikan dua input dengan nilai sama maka motor dc akan berhenti. maksud nilai disini adalah HIGH atau LOW.
jadi :
HIGH HIGH = motor tidak berputar
HIGH LOW = motor berputar
LOW LOW = motor tidak berputar
b.) Rangkaian Simulasi
saat berlogika 0
saat berlogika 1 :

c.) Video
d.) Download File
Rangkaian pengontrol kecepatan motor disini
Datasheet sensor optocoupler disini
Datasheet sensor ultrasonik disini
Video simulasi rangkaian disini
-Mengetahui dan memahami sensor ultrasonik dan optocoupler
-Mampu menjelaskan prinsip kerja sensor ultrasonik dan optocoupler
-Mampu mengaplikasikan sensor ultrasonik dan optocoupler pada rangkaian
-Mampu menjelaskan prinsip kerja sensor ultrasonik dan optocoupler
-Mampu mengaplikasikan sensor ultrasonik dan optocoupler pada rangkaian
2. Alat dan Bahan[kembali]
1) Sensor optocoupler
2) Power
2) Power

4) Op-Amp
5) Transistor ( 2N1711 )
6) Motor DC
7) Led
8) Baterai DC

10) Voltmeter DC

11) Sensor ultrasonic



Sensor Optocoupler
Optocoupler juga dikenal dengan sebutan Opto-isolator, Photocoupler atau Optical Isolator. Optocoupler adalah komponen elektronika yang berfungsi sebagai penghubung berdasarkan cahaya optik. Pada dasarnya Optocoupler terdiri dari 2 bagian utama yaitu Transmitter yang berfungsi sebagai pengirim cahaya optik dan Receiver yang berfungsi sebagai pendeteksi sumber cahaya.

Masing-masing bagian Optocoupler (Transmitter dan Receiver) tidak memiliki hubungan konduktif rangkaian secara langsung tetapi dibuat sedemikian rupa dalam satu kemasan komponen.
Sensor Ultrasonik
Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya. Cara kerja sensor ini didasarkan pada prinsip dari pantulan suatu gelombang suara sehingga dapat dipakai untuk menafsirkan eksistensi (jarak) suatu benda dengan frekuensi tertentu. Disebut sebagai sensor ultrasonik karena sensor ini menggunakan gelombang ultrasonik (bunyi ultrasonik).

Gelombang ultrasonik adalah gelombang bunyi yang mempunyai frekuensi sangat tinggi yaitu 20.000 Hz. Bunyi ultrasonik tidak dapat di dengar oleh telinga manusia. Bunyi ultrasonik dapat didengar oleh anjing, kucing, kelelawar, dan lumba-lumba. Bunyi ultrasonik nisa merambat melalui zat padat, cair dan gas. Reflektivitas bunyi ultrasonik di permukaan zat padat hampir sama dengan reflektivitas bunyi ultrasonik di permukaan zat cair. Akan tetapi, gelombang bunyi ultrasonik akan diserap oleh tekstil dan busa.
Karakteristik HC-SR04 :

- Tegangan sumber operasi tunggal 5.0 V
- Konsumsi arus 15 mA
- Frekuensi operasi 40 KHz
- Minimum pendeteksi jarak 0.02 m (2 cm)
- Maksimum pendeteksian jarak 4 m
- Sudut pantul gelombang pengukuran 15 derajat
- Minimum waktu penyulutan 10 mikrodetik dengan pulsa berlevel TTL
- Pulsa deteksi berlevel TTL dengan durasi yang bersesuaian dengan jarak deteksi
- Dimensi 45 x 20 x 15 mm

gambar 7 sensor ultrasonik
Fungsi Pin-pin HC-SR04 :
- VCC = 5V Power Supply. Pin sumber tegangan positif sensor.
- Trig = Trigger/Penyulut. Pin ini yang digunakan untuk membangkitkan sinyal ultrasonik.
- Echo = Receive/Indikator. Pin ini yang digunakan untuk mendeteksi sinyal pantulan ultrasonik.
- GND = Ground/0V Power Supply. Pin sumber tegangan negatif sensor.
Non Inverting Amplifier
Rangkaian non inverting amplifier (tidak membalik), input dimasukkan ke kaki non inverting sehingga tegangan output yang dihasilkan sefasa dengan tegangan input. Untuk mencari turunan penguatan tegangan ACL maka rangkaian dimisalkan dahulu dengan input dc positif, seperti gambar 123.
Gambar 123 Rangkaian non inverting amplifier dengan input dc positif
Dari rangkaian gambar 123 dengan syarat op-amp ideal Ed = 0 maka VA = Vi sehingga rangkaian dapat disederhanakan untuk mencari arus I seperti gambar 124.
Gambar 124 Rangkaian untuk menghitung arus I
Dengan  maka dapat dicari ACL rangkaian non inverting amplifier gambar 123, yaitu;
maka dapat dicari ACL rangkaian non inverting amplifier gambar 123, yaitu;
maka dapat dicari ACL rangkaian non inverting amplifier gambar 123, yaitu; Adapun hasil simulasi bentuk gelombang I-O seperti gambar 125 dan karakteristik I-O seperti gambar 126.
Gambar 125 Bentung gelombang tegangan output VO dengan input Vac
Gambar 126 Kurva karakteristik I-O
kurva sensor optocoupler hubungan kecepatan terhadap waktu
kurva sensor ultrasonic hubungan antara waktu dengan jarak :
Merupakan piranti elektronika yang mengubah energi listrik menjadi energi mekanik. pada motor DC terdapat 2 Input yang jika diberikan input yang berbeda maka motor akan berputar CCW atau CW tergantung pada inputan yang dimasukan dan jika diberikan dua input dengan nilai sama maka motor dc akan berhenti. maksud nilai disini adalah HIGH atau LOW.
jadi :
HIGH HIGH = motor tidak berputar
HIGH LOW = motor berputar
LOW LOW = motor tidak berputar
LOW HIGH = motor berputar
4. Percobaan[kembali]
a.) Prinsip kerja
Pada saat sensor ultrasonik berlogika 1 transistor yang terhubung pada kaki trigger pada sensor ultrasonik akan menyala yang menandakan bahwa adanya suatu benda yang menghalangi sensor. Lalu setelah diterima oleh sensor ultrasonik maka tegangan akan dikeluarkan di kaki echo dan diperkuat oleh op-amp (amplifier non inverting) lalu tegangan yang dikeluarkan dari op-amp masuk ke kaki basis pada transistor. Karena besar tegangan transistor >0,7 volt maka transistor aktif. Maka kaki kolektor mendapat tegangan pada power supply dan tegangan pada kaki emitor akan diteruskan ke optocoupler. Pada optocoupler tegangan masuk ke pin 1 dan dikeluarkan melewati pin 2 menuju resistor dan melewati led, karena pada pin 1 aktif maka led dapat menyala. Lalu power suply R1 melewati resistor dan masuk ke pin 5 dan dikeluarkan melalui kaki pin 4 lalu di teruskan ke ground. Arus melewati resistor lalu masuk ke kaki basis trasnsistor. Karena besar tegangan transistor >0,7 volt maka transistor aktif, pada kaki emitor trasnsitor melewati diode dan relay. Karena tegangan yang dilalui relay tidak mencapai tegangan minimum untuk menghidupkan relay maka switch pada relay off, motor tidak berputar dan speaker menjadi off.
Pada saat sensor ultrasonik berlogika 0 transistor yang terhubung pada kaki trigger pada sensor ultrasonik tidak menyala yang menandakan bahwa tidak adanya benda yang menghalangi sensor. Maka tegangan yang dikeluarkan nol sehingga led tidak menyala. Tetapi pada power suply R1 melewati resistor dan masuk ke pin 5 dan dikeluarkan melalui kaki pin 4 lalu di teruskan ke ground. Arus melewati resistor lalu masuk ke kaki basis trasnsistor. Karena besar tegangan transistor >0,7 volt maka transistor aktif, pada kaki emitor trasnsitor melewati diode dan relay. Karena tegangan yang dilalui relay mencapai tegangan minimum untuk menghidupkan relay maka switch pada relay menjadi on, motor berputar dan speaker menjadi on.
b.) Rangkaian Simulasi
saat berlogika 0

saat berlogika 1 :
c.) Video
d.) Download File
Rangkaian pengontrol kecepatan motor disini
Datasheet sensor optocoupler disini
Datasheet sensor ultrasonik disini
Video simulasi rangkaian disini
Library sensor ultrasonik disini


Tidak ada komentar:
Posting Komentar